How Robot Speed Ratings Are Derived
Published speed ratings are measured under idealised test conditions. The robot performs a standardised motion cycle with a defined payload, often at the centre of its working envelope where mechanical advantage is greatest. There are no obstacles to avoid, no vision processing delays, no coordination requirements with other equipment, and no variability in the task being performed.
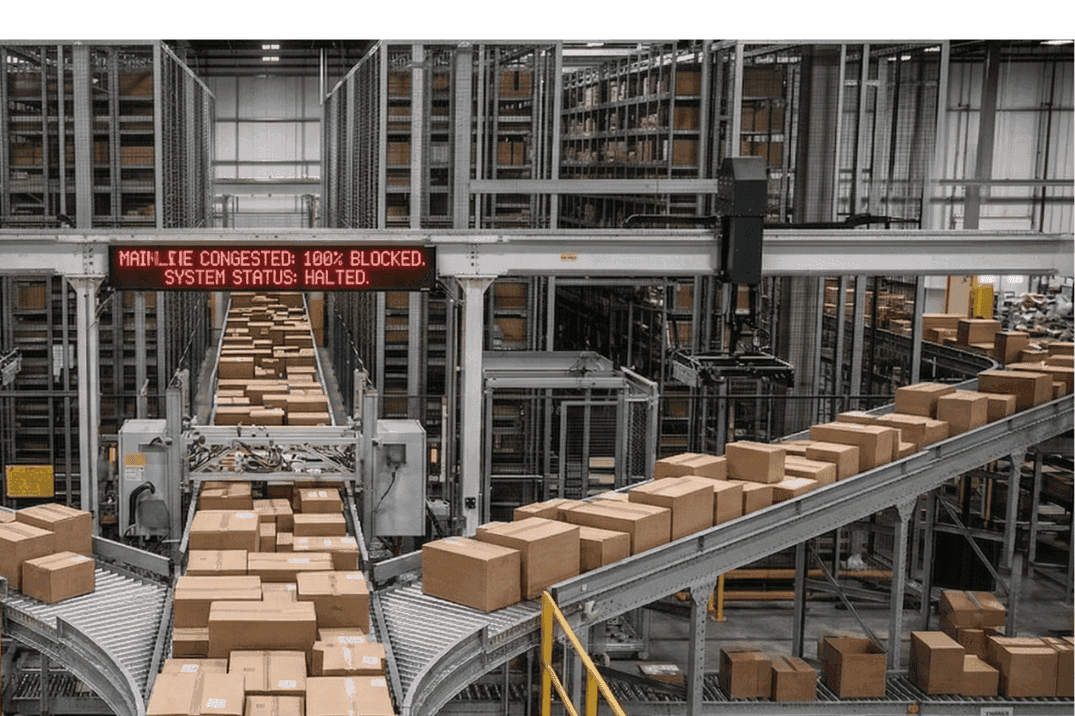
These conditions bear little resemblance to a real production cell, where the robot must contend with variable product positions, vision system latency, gripper changeover time, and the constraints imposed by upstream and downstream material flow.

The gap between test conditions and production reality is consistent, predictable, and significant enough to affect project outcomes if not accounted for during specification. Failing to adjust for this gap is one of the most common causes of capacity shortfalls in new robotic installations.
This is especially true for vision-guided robots and advanced vision-guided robots, where flexibility in handling variable inputs often comes with an unavoidable processing overhead that is absent from standard speed tests.