The Hardware Is Rarely the Bottleneck
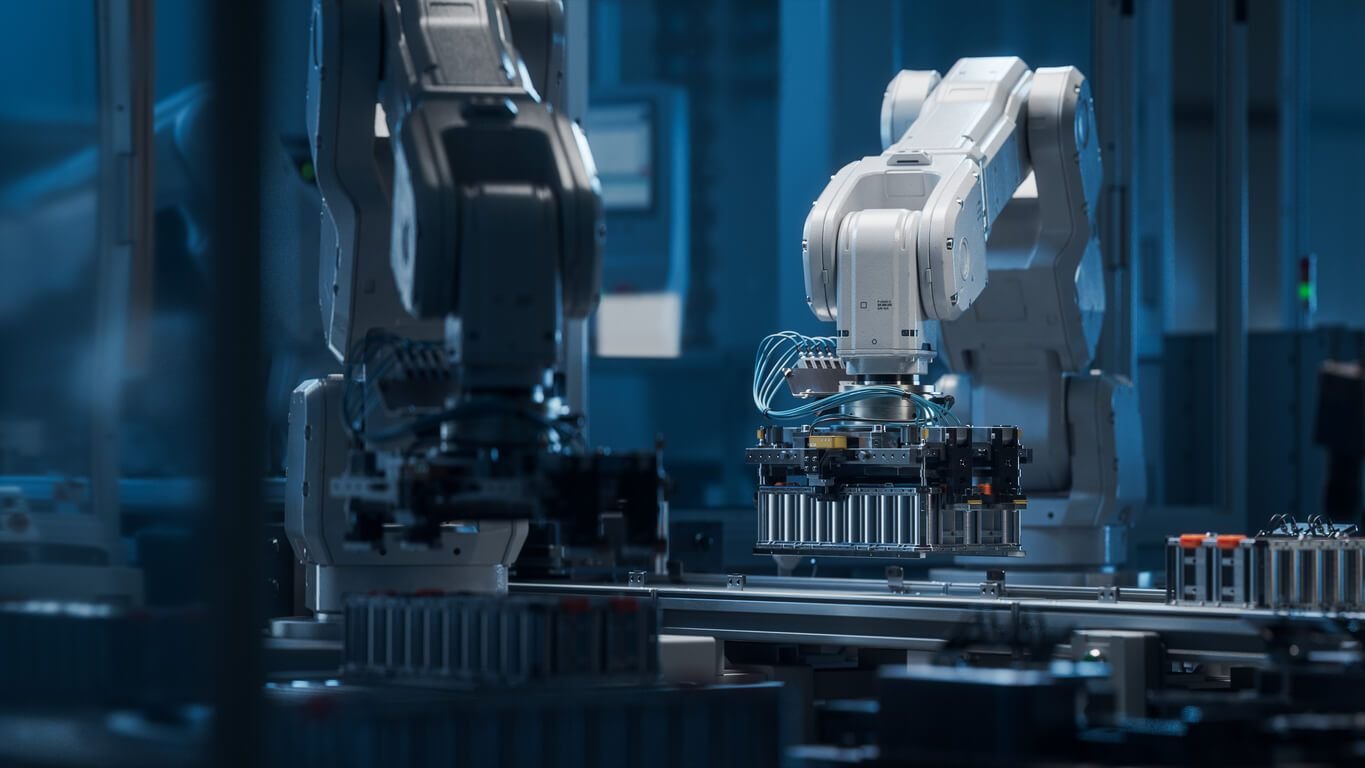
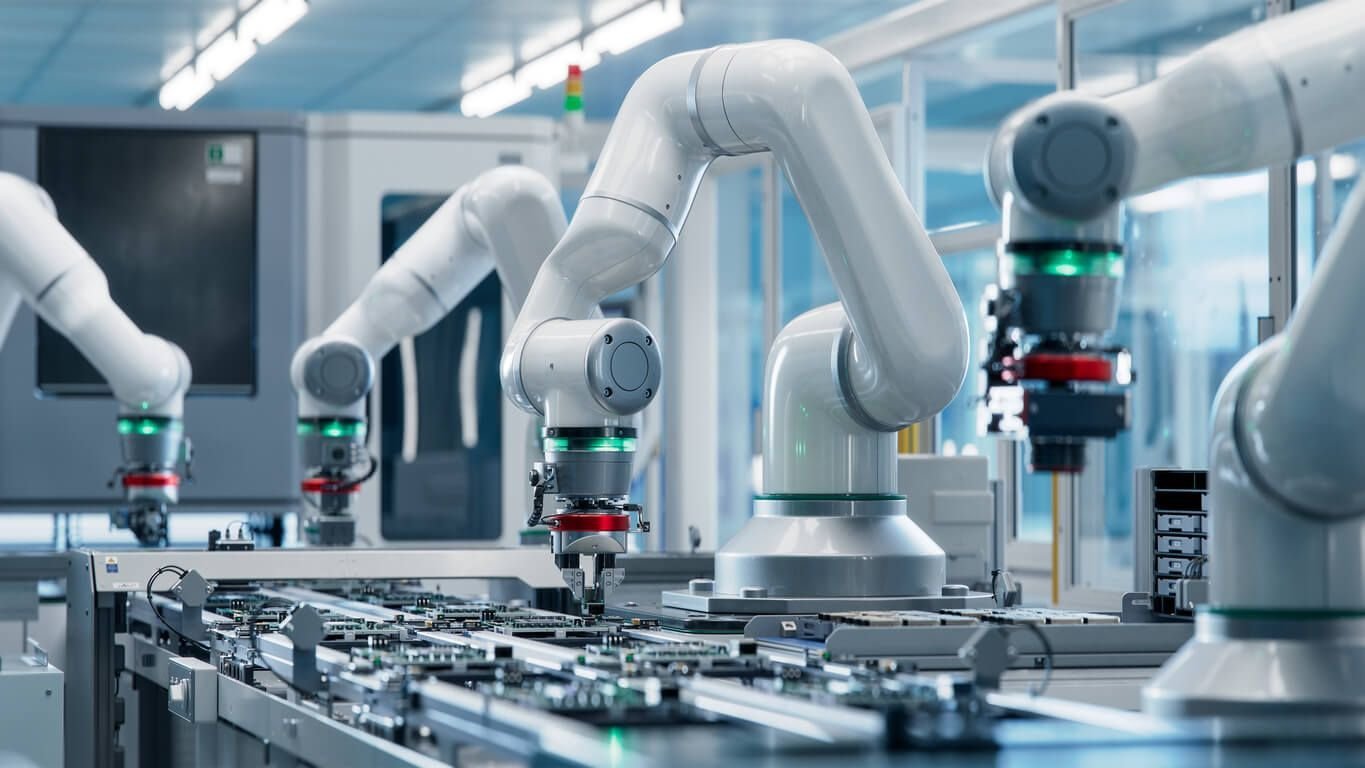
Modern industrial robots are remarkably capable machines. Leading manufacturers produce arms with repeatability measured in fractions of a millimetre, payload capacities spanning from a few kilograms to over a tonne, and cycle speeds that exceed the demands of most applications. The mechanical engineering of contemporary robots is mature, refined, and reliable.
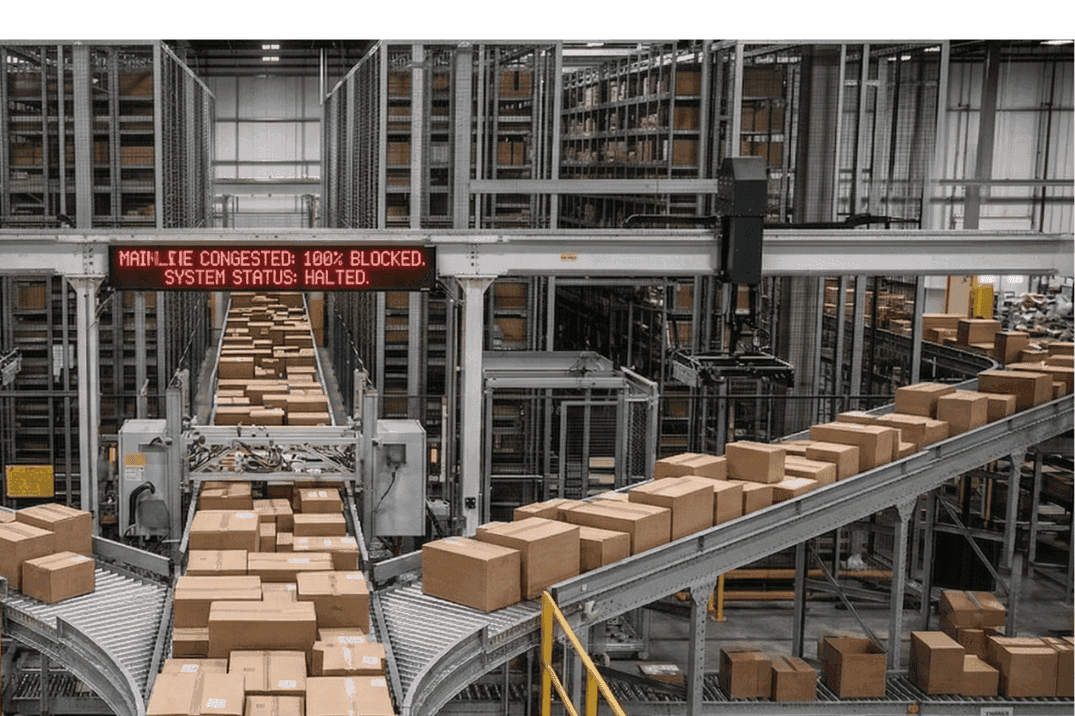
In practice, the mechanical capability of the robot is almost never the factor that limits system performance. The robot can physically move fast enough, carry enough, and reach far enough for the vast majority of tasks it is deployed to perform. The limitation lies in the software that tells it what to do, when to do it, and how to coordinate with everything around it. This is where performance is gained or lost.
That point is especially clear in applications such as Pick & Place Robots, automated handling, collaborative robots, and production line automation, where the hardware may be fully capable but the surrounding logic still determines whether the operation delivers stable throughput, product quality, and quality control.