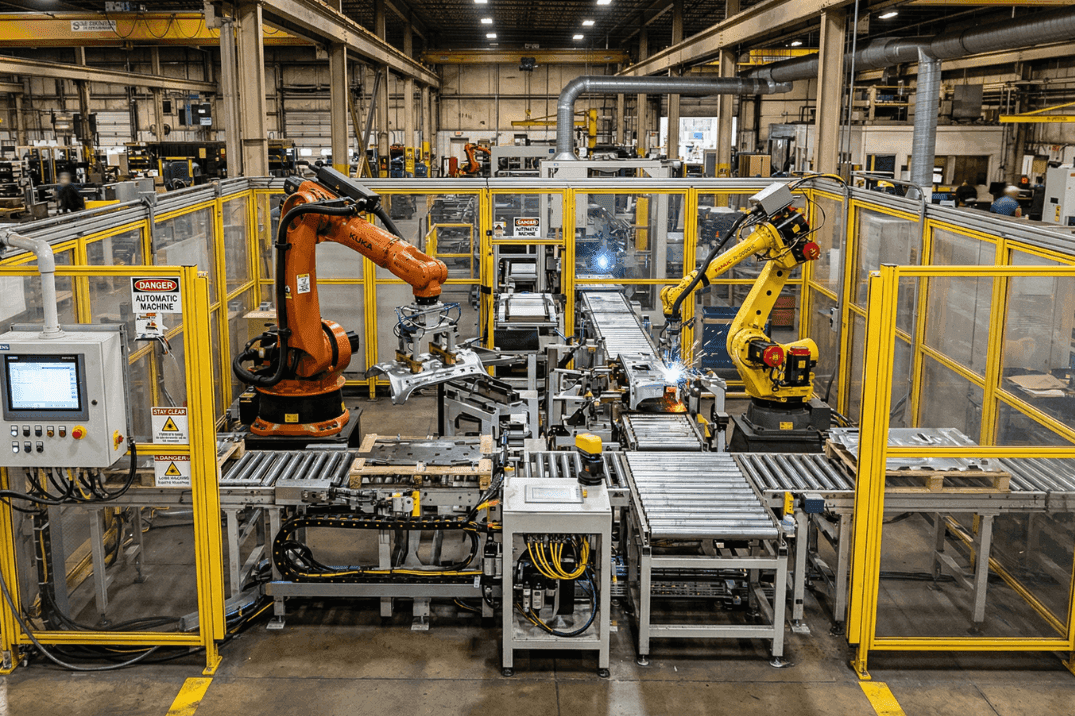
Payload Capacity Defines Operational Boundaries
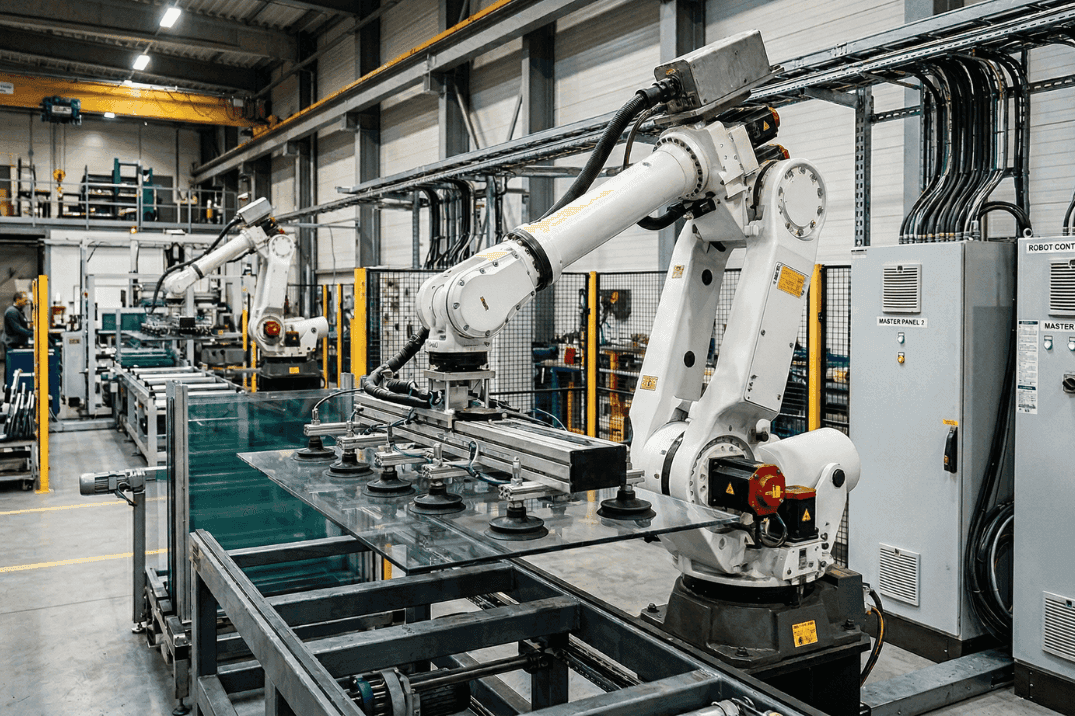
Every industrial robot operates within strict payload limits that determine which components it can safely manipulate. These specifications include not only the weight of the workpiece but also the mass of any end-effector tooling. A gripper designed to handle awkwardly shaped components might weigh several kilograms, substantially reducing the effective payload available for the actual part. In practice, the performance of a robot arm is always shaped by these physical limits, even within a highly capable automated system.
Manufacturers sometimes underestimate the cumulative weight of multiple small components or the additional mass introduced by fixtures and jigs. When payload capacity proves insufficient, the entire cell design may require reconfiguration with a larger, more expensive robot model.
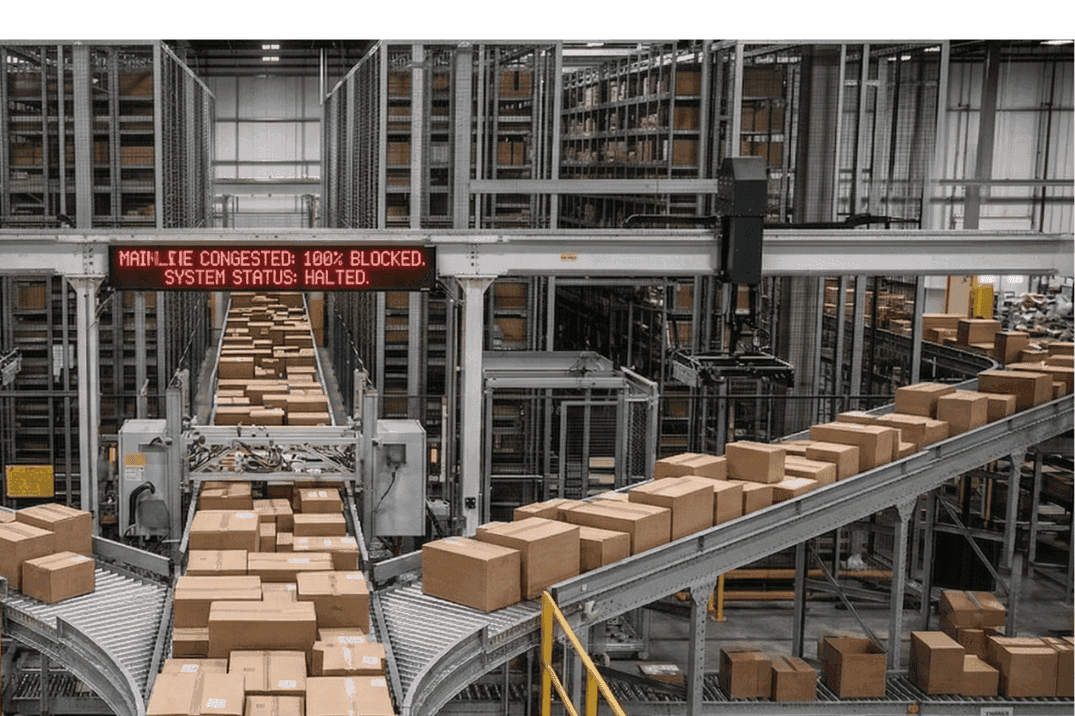
Cycle Time Constraints Impact Production Targets
The speed at which a robotic cell can complete operations often falls short of theoretical expectations. Acceleration and deceleration phases consume significant portions of the cycle, particularly when precision is required. Robots must slow down as they approach target positions to achieve accurate placement, adding time to each movement.
Tool changing, part inspection, and communication with other equipment all introduce delays that accumulate across production runs. A cell that appears capable of meeting output targets in simulation may struggle to achieve the same performance in reality due to these incremental time losses. In many cases, the constraint is not the robot alone but the wider manufacturing process that surrounds it.